Infant Temperament Estimation Using Viewpoint Video of Remote Childcare RobotExplainable Temperament Estimation by Robot
Abstract
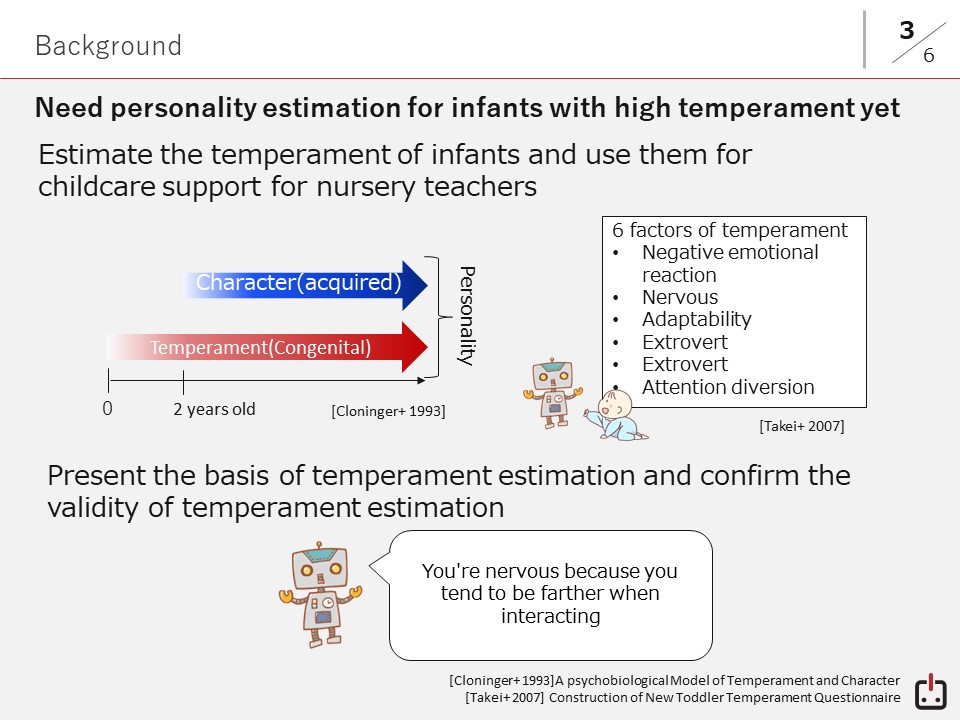
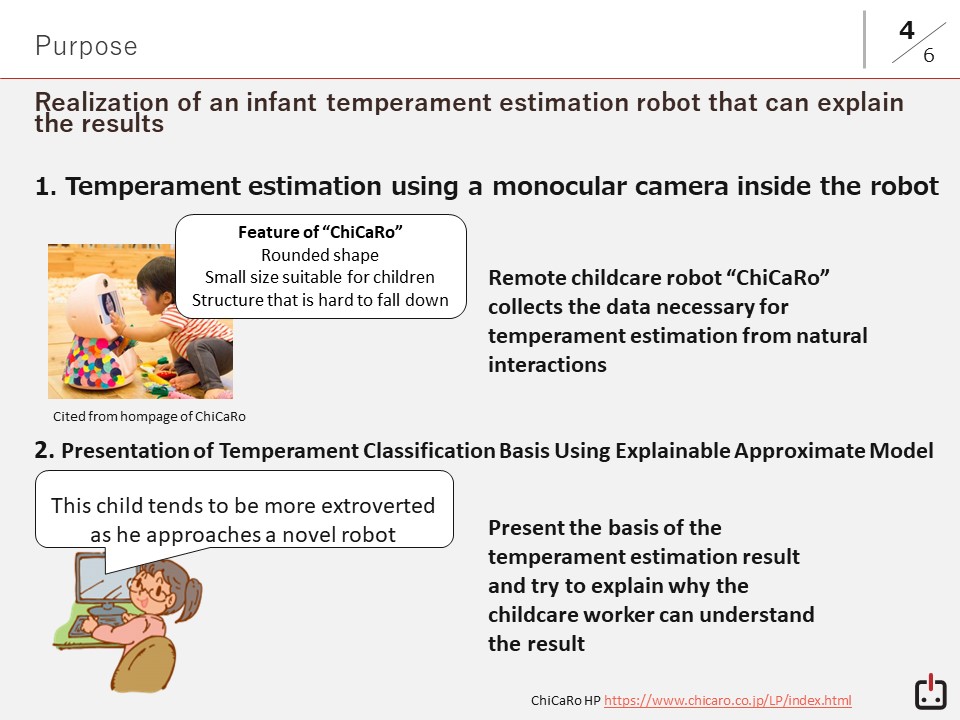
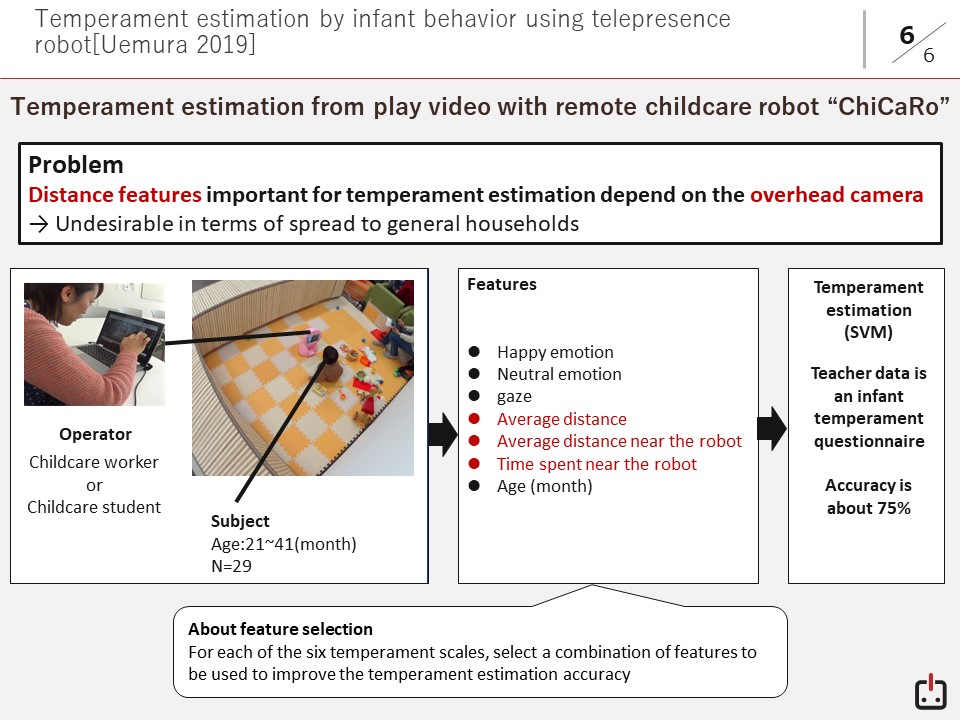
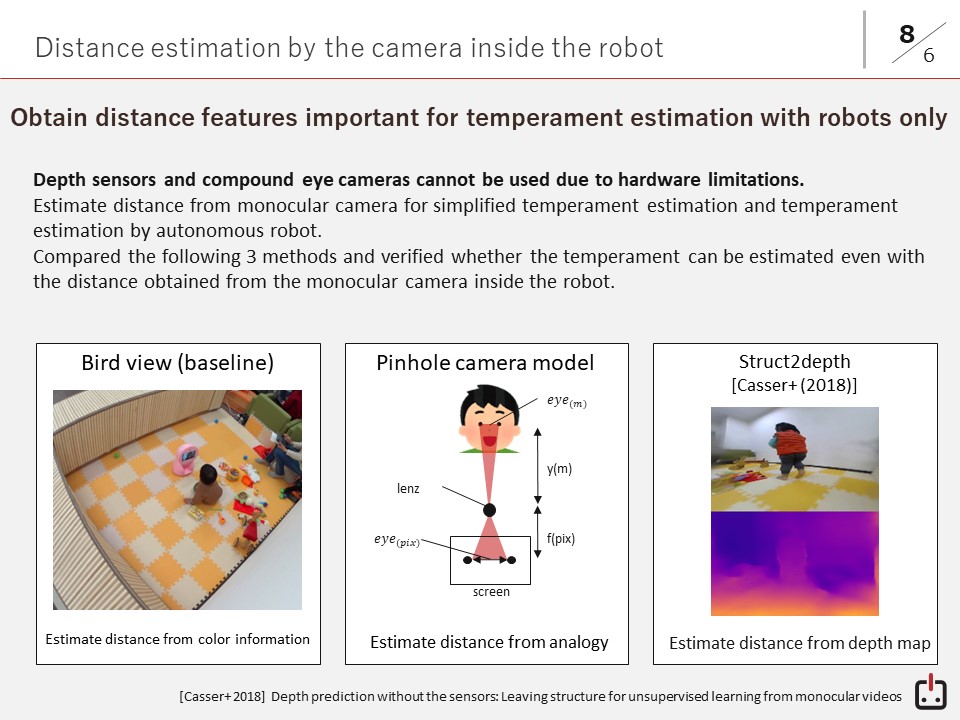
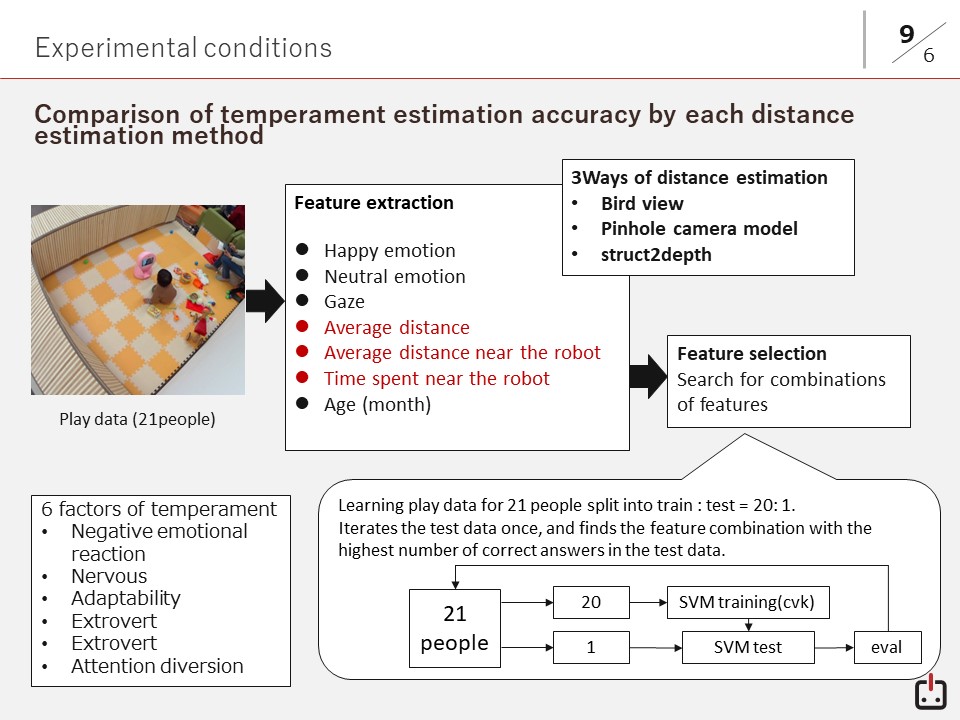
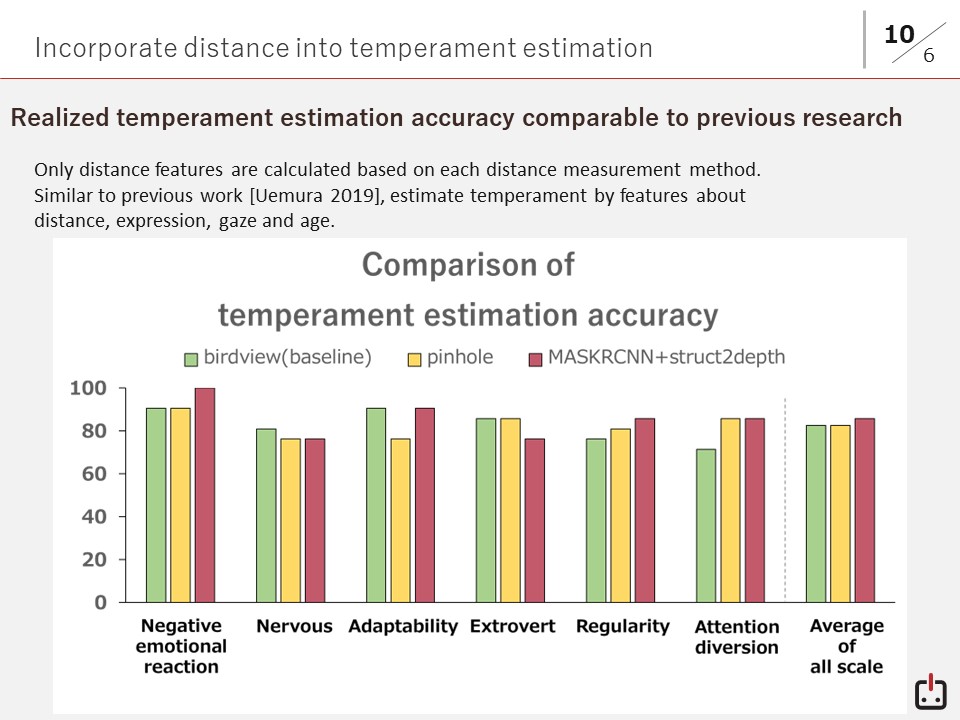
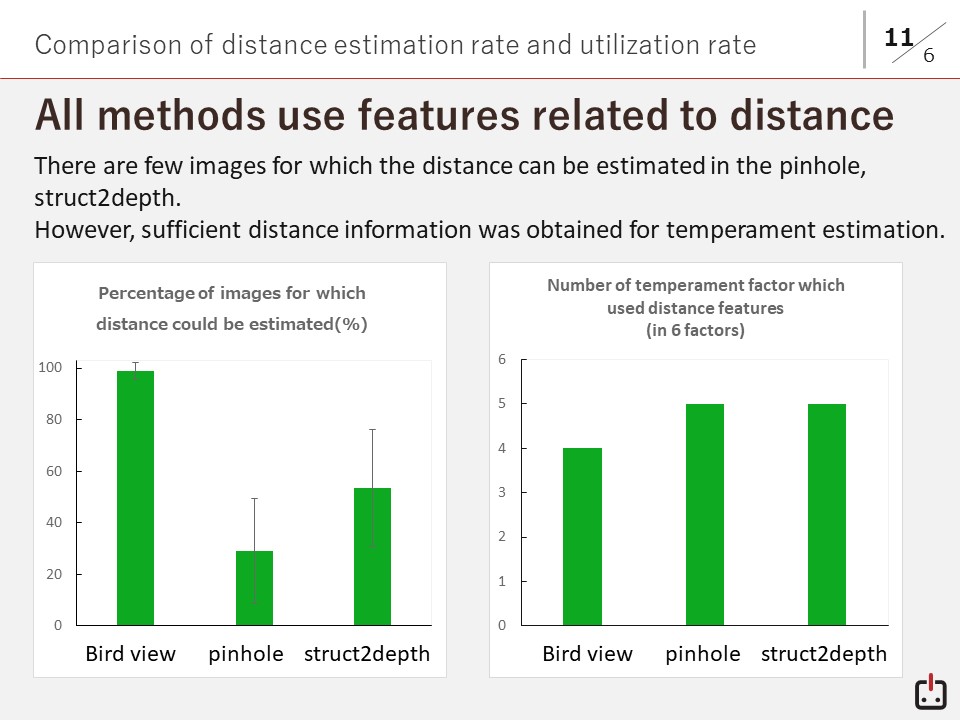
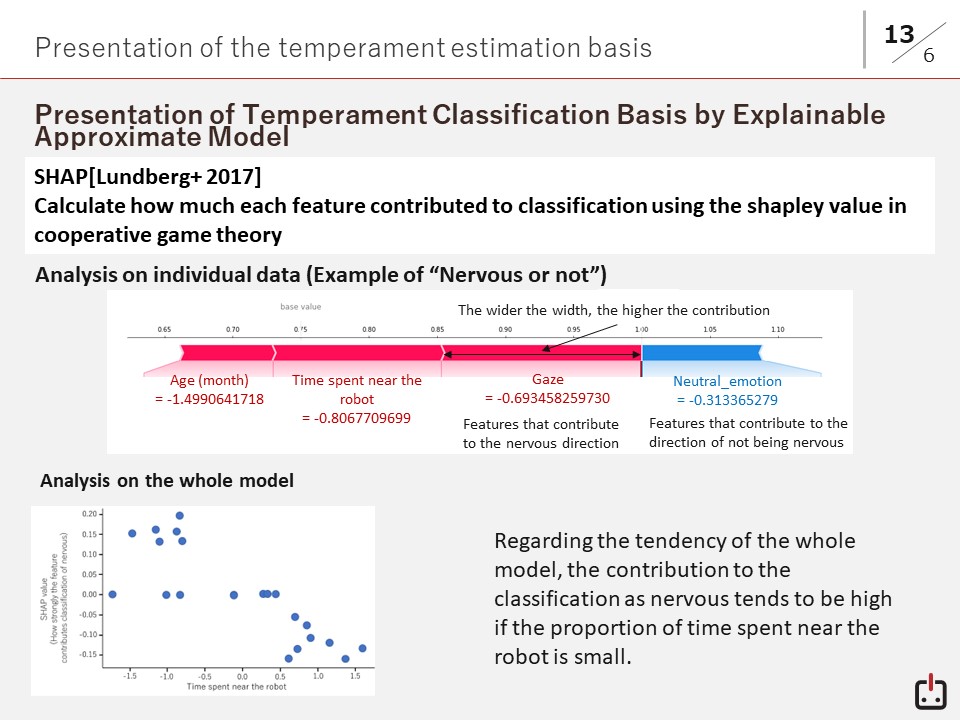
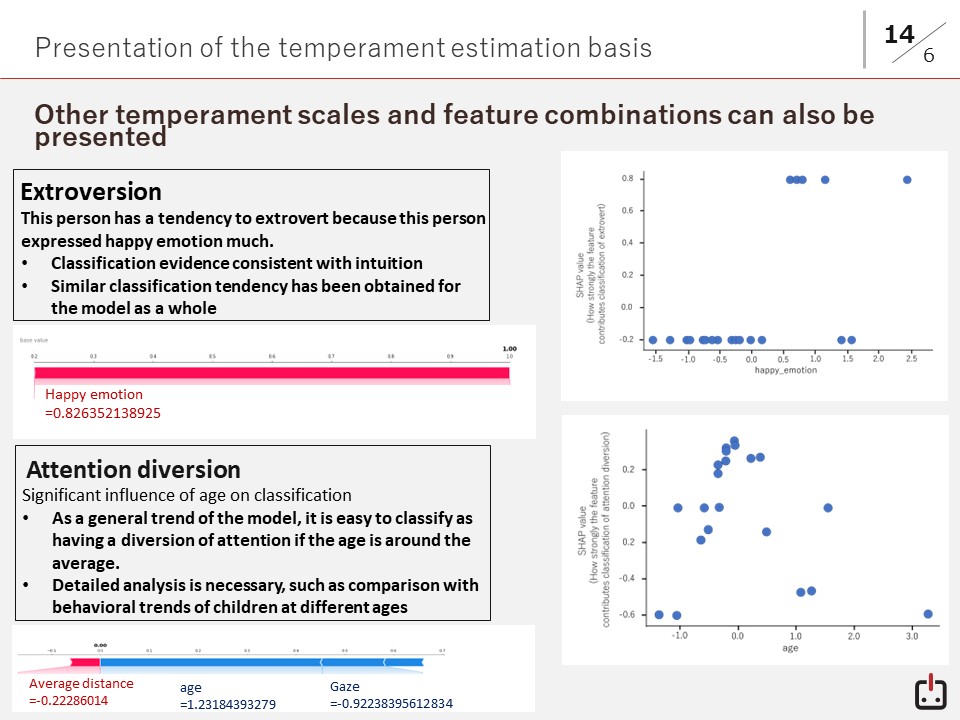
With the advancement of robots into society, there is a need for robots that can interact with humans like humans. In such a situation, knowing the personality of other person can be information for determining the action of the robot during the interaction. In fact, there are many studies where robots estimate human personality. However,there are few examples of estimating temperament for infants with a high proportion of temperament in personality. Therefore, in this research, we establish a method to estimate the temperament of the target infant using the sensor information acquired by ChiCaRo itself from the interaction with the infant by the remote operation robot ChiCaRo for infants. In addition, we will discuss the temperament classification grounds using an explanatory model of the classification grounds, which has been actively studied in recent years.
Main Publications
- Temperament estimation of toddlers from child–robot interaction with explainable artificial intelligence, advanced robotics, 2021.