家庭用ロボットの自律化に向けた動作の学習 遠隔操作から動作を学習するロボット
家庭用ロボットの現状
 ロボットは既に家事を行える体と目を持っている
ロボットは既に家事を行える体と目を持っている
近年家庭用ロボットの開発が活発化している.ロボットは,既に家庭の中で活動するのに必要な身体と,優れた認識能力を獲得している.環境における行動を作りこむことで,その環境の中ならば自律的な活動も行うことができる.しかし,環境は多様であり,全ての環境を想定し,その環境に即した行動を全て事前に作成しておくことは不可能に近い.従って,今現在の段階において,人間の生活支援を自律的に行えているロボットはいない.ロボットが家庭環境で自律的に活動を行うためには,環境に即した行動を自ら学習し,状況に応じて実行できる必要がある.本研究では,家庭用ロボットが家庭内において自律的に人間の生活支援を行うために,環境内での活動を学習することを目指す.
家庭内の活動を学習するためには
 家庭内における行動には共通した身体の動きが存在する
家庭内における行動には共通した身体の動きが存在する
環境に即した行動を事前に作りこむことができないのは,環境の変化に応じて,行動として行われる身体の動きが変化することが原因である.物を取るという行動を例に挙げるならば,物が高いところにあるならば腕を上げる必要があり,物が倒れているならば,倒れている向きに合わせた手首の回転が必要となる.しかしこれらの身体の動きには共通したものが存在すると考えられる.従って,この共通した動きを基本動作とし,この基本動作を学習し組み合わせることで,行動の獲得を図る
身体情報の収集と基本動作の抽出
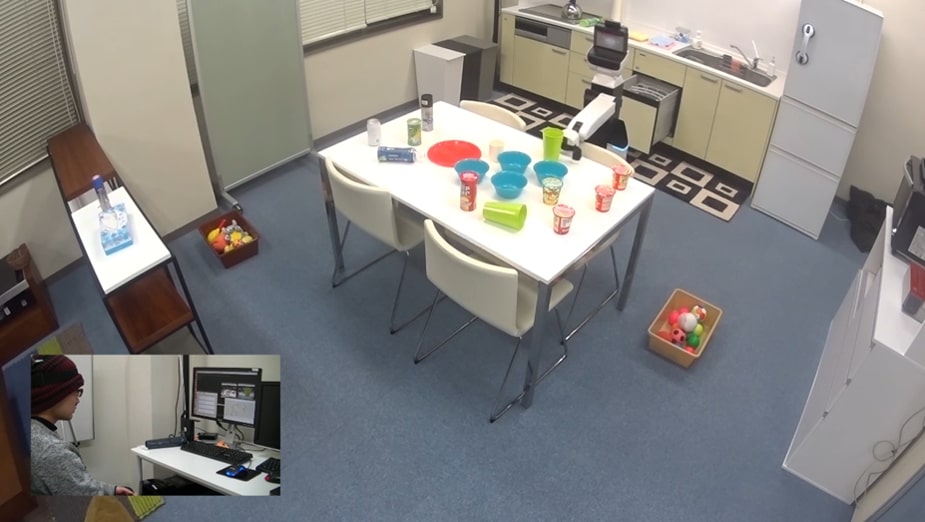
 遠隔操作による家庭内タスクの実行
遠隔操作による家庭内タスクの実行
基本動作の抽出を行うため,実環境において家庭内タスクを行う.しかし,初期段階においてロボットは自律的に活動することができない.そこで,タスク実行の為,遠隔操作により家庭内タスクを行う.ユーザーはロボットの視界から環境を認識しつつ,コントローラを用いてロボットを操縦,家庭内タスクを行う.ロボットはタスク実行時における自身の身体情報とカメラから取得される視覚情報を収集する.そして,収集した情報を元にそのタスクを構成する基本となる動作の学習を行う.動作の学習には参照点に依存したガウス過程に基づく隠れセミマルコフモデルを用いる.この手法を用いることで身体情報と視覚情報から,そのタスクを構成するうえで基本となる動作を獲得することができる.
獲得した基本動作の実行
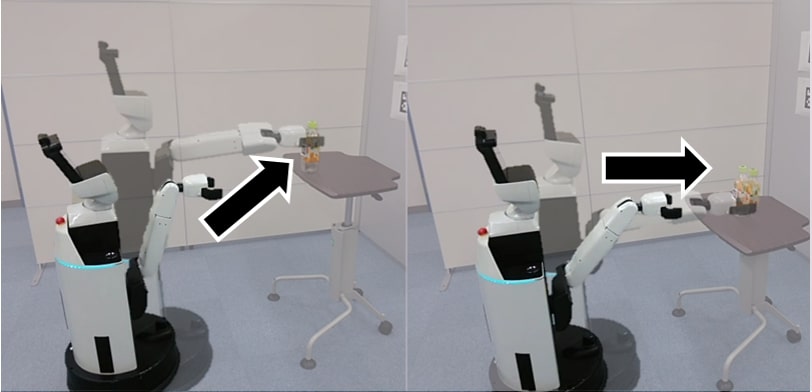 学習した基本動作の実行
学習した基本動作の実行
参照点に依存したガウス過程に基づく隠れセミマルコフモデルは,基本動作をガウス過程として獲得することができる.従って,このガウス過程により生成された軌道を実行することで,獲得した基本動作を実行することができる.また,それぞれの基本動作は自身の軌道を表現するうえでの基準となる対象を持つ.よって,それらの対象を基準として動作を実行することで,環境の変化にも幅広く対応することができる.
Main Publications
- 岩田健輔,池田成満,青木達哉,西原成,中村友昭,長井隆行,”動作の分節化に基づく家事タスクにおける行動の構造化”,第30回日本人工知能学会全国大会,2016
- 岩田健輔,中村友昭,長井隆行,持橋大地,小林一郎,麻生英樹,“参照点に依存したガウス過程隠れセミマルコフモデルに基づく連続動作の分節化”,第34回日本ロボット学会学術講演会,2016
- 岩田健輔,宮澤和貴,池田成満,青木達哉,中村友昭,長井隆行,“ロボットの連続的な動作学習のためのフレームワーク”,第31回日本人工知能学会全国大会 .2017
- 岩田健輔,宮澤和貴,青木達哉, 中村友昭, 長井隆行,“サービスロボット用統合ビジョンシステムの開発”,インテリジェントホームロボティクス研究会 2017year: 2017