サービスロボットによる「おもてなし」の実現
研究背景
近年,人工知能を搭載したロボットが発展し,徐々に労働基盤として産業に浸透しつつある.例えばサービスロボットは,レストランやホテル,デパートなど公共の場に導入され,人に代わり接客サービスを提供し始めている.しかしそのサービスの質は,人間にははるかに及ばない.その原因は,人のようなサービスを提供するのに十分な,モビリティーをはじめとする機能が欠落していることにある.また,人が提供するサービスの本質がどのようなものであり,それをロボットでどのように実現するのかが明らかになっていないことも大きな問題である.
研究目的
本研究では特にレストランにおけるサービスロボットを対象として,人が提供するサービスを参考にすることで,「おもてなし」を定式化し,ロボットに導入する方法を模索する.また,実際のレストランで給仕ロボットを運用し,現状の自律移動技術の評価や「おもてなし」を実現するために解決するべき技術的課題の抽出を行う.
研究内容
中国パンゴリン社と共同で,自律移動型の給仕ロボットを開発し,同社が保有するレストランで実証実験を行った.実際のレストランの写真とロボットが SLAM によって生成した地図を以下に示す.
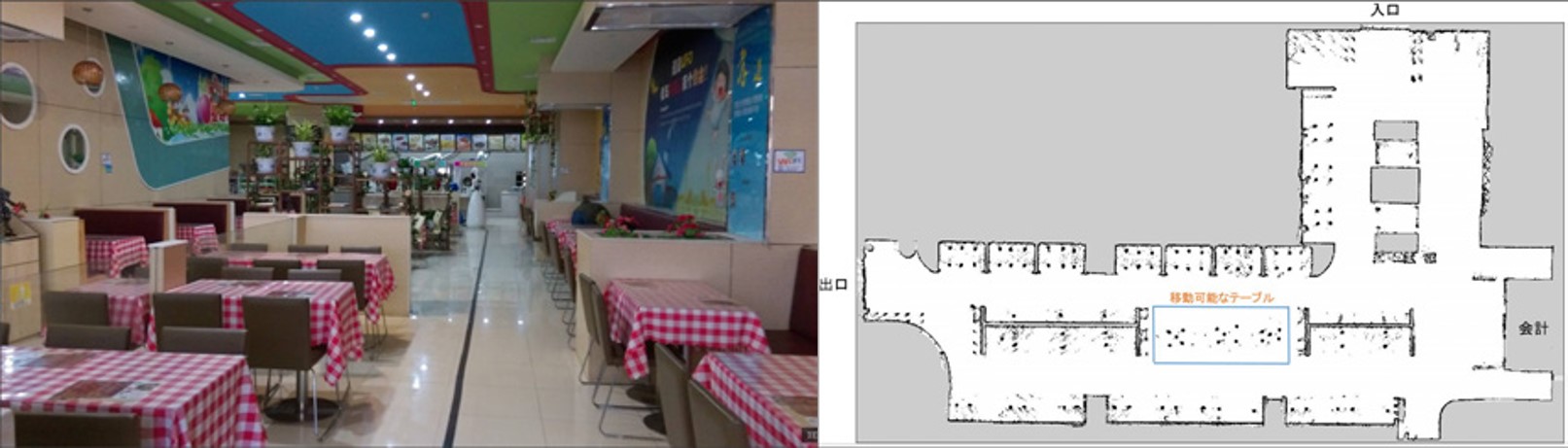
こうした環境の中でロボットは,実際に自律移動による配膳を行った.人に囲まれるなど様々な状況においても,概ね問題なく配膳を行うことが可能であった.また,複数台のロボットによる実証なども行っている.


動作,意図と環境の関係
こうした基本的なロボットの機能に対して,何をプラスすることで人が提供するような「おもてなし」を実現できるかが現状の研究課題である. 我々はこれに対して,配膳という比較的単純なサービスであっても,ユーザの意図を考慮した行動プランニングが重要であると考えている.
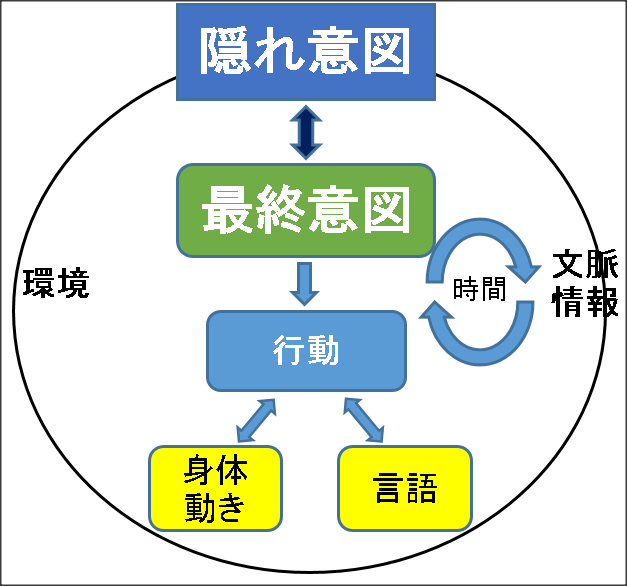
生態心理学的視点から,環境,文脈,行動,意図の4つの関係を整理すると,左のように書けると考えられる. つまり人間の動作パターンは,環境や文脈に大きく依存する. 逆に言えば,環境や文脈は人間の動作や意図を制限することになる.レストランであるという制約を考慮することで,人間の行動の観測から最終的な意図を予測することができる.それをナビゲーションに活用することで,単なる移動に付加価値をつけることができるのではないかと考えている.
Main Publications
- 裴雅超, 長井隆行, "実レストランにおけるロボットナビゲーション実験," 第34回日本ロボット学会学術講演会, RSJ2016AC3G2-02, 2016
- 日経ロボティクス, 中国で急速に普及するレストラン向けサービスロボ, pp.10-12, 2017.01