ロボット操作とコミュニケーション テレプレゼンスロボットにける遊びの操作性とコミュニケーションの両立を目指したユーザインタフェース(UI)デザイン研究

目指すもの
本研究は、テレプレゼンスロボット操作者の個人的操作レベル(経験や世代による電子機器操作の差異)に依らず、円滑なコミュニケーションを維持できる高度な操作性をもつユーザインタフェースデザイン(UI デザイン)のプロトタイプの提案を目指している。
研究について
家庭へのロボット普及も進んできた日本において、企業などで注目され始めたテレプレゼンスロボットの普及も目前であると考えられる。
本研究で用いる子育て支援のためのテレプレゼンスロボット「ChiCaRo」では、ロボット側 に幼児が対峙し、ロボットの操作側は幼児の孫をもつ祖父母世代である。子供の集中力を持続させるための円滑なコミュニケー ションが取れるよう、また、電子機器操作に慣れていない人にも容易に操作ができるよう、高い操作性が必要となる。
このようなユーザインタフェースは、家庭だけではなく様々な場面へのテレプレゼンスロボットの普及においても重要な点であると考える。

アプローチ方法
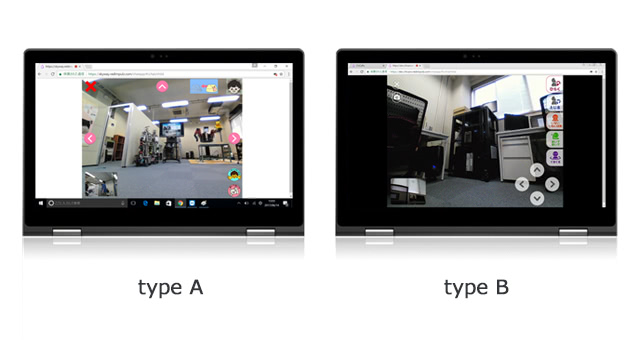
2 種類の UI デザインを用いた比較
デザインの異なる 2 種類の UI を用いて操作者に子供と遊んでもらい、操作性の違いと円滑なコミュニケーションが取れているか検証する。
実験の詳細
アイトラッカーとアンケート、ヒアリングにより同一操作者の時系列での変化が UI に依存するのか検証する。
| UI | サイズ | イラスト | 配置 |
|---|---|---|---|
| typeA | 小さい | 詳細 | 3 辺 |
| typeB | 大きい | 単純 | aaa |
子育て支援ロボット「ChiCaRo」とは
ChiCaRo とは「ビデオチャット+ロボット+遠隔操作」の技術を合わせたテレプレゼンスロボットである。子育ての負担軽減を目的とし、乳幼児のいる家庭で用いることを想定している。例えば保護者が家事などで手が離せない時、遠隔地に住む祖父母がロボットを操作して子供と遊んでもらうことで、その間、保護者は家事に集中することができる。また、単身赴任家庭では日々遠隔地から子供と遊ぶことができるようにもなる。
このような ChiCaRo において、コミュニケーションとロボット操作が両立すれば、よりリアルな遊び体験ができるようになると考えられる。
