多感覚情報からの潜在情報の学習 認知発達過程の再現に向けて
概要
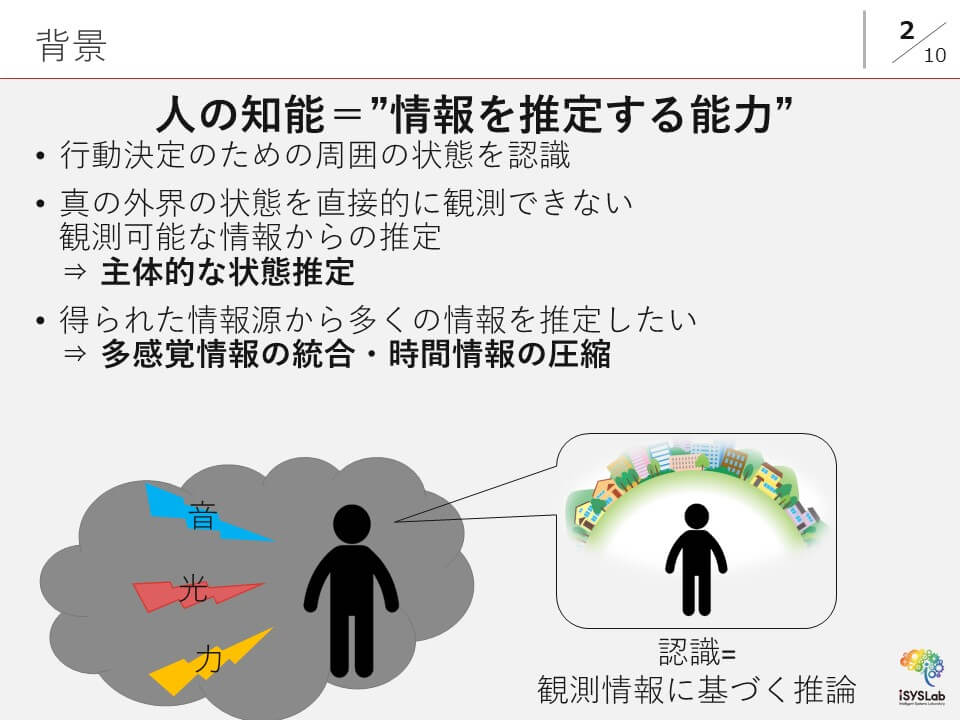
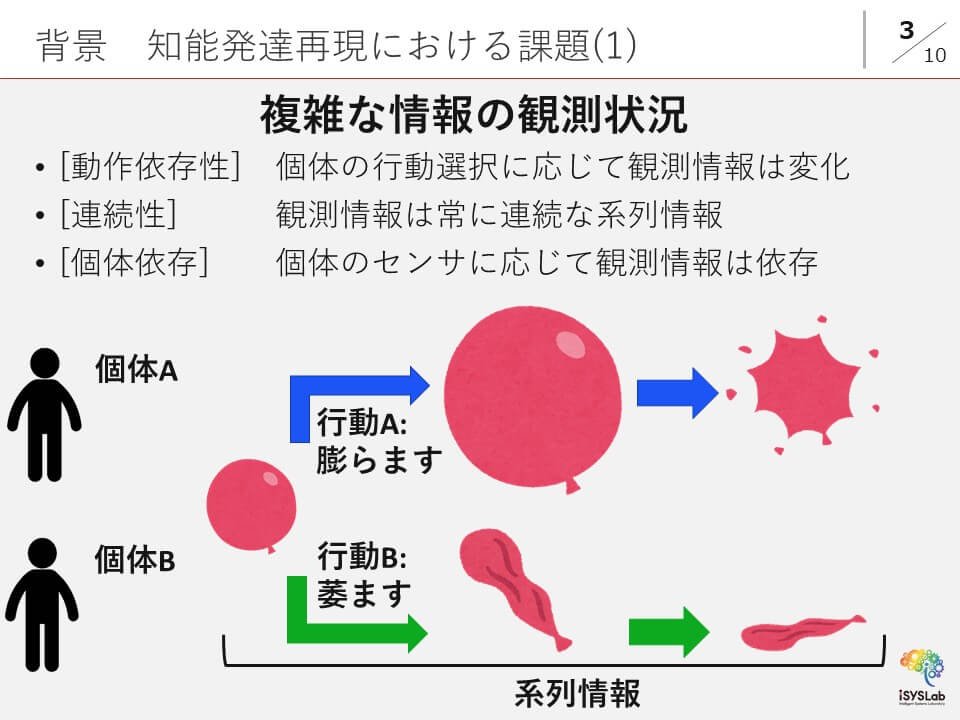
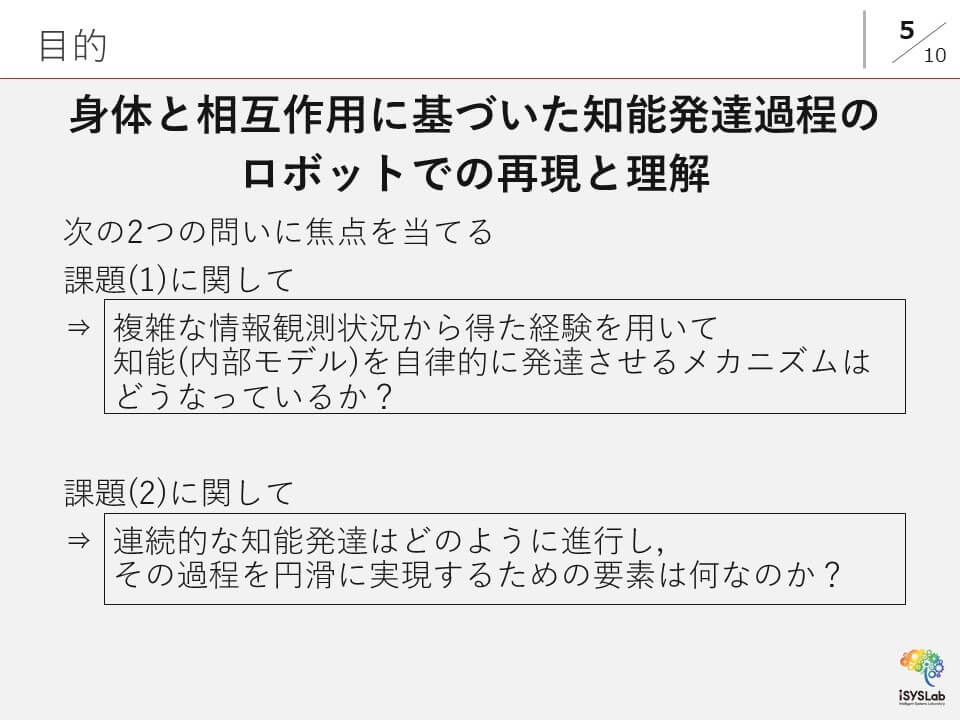
本研究の目的は、身体運動制御から行動決定といった知能発達過程をロボットで再現し,その過程を理解することである。知能発達は、身体と環境の相互作用が影響を与える連続的な変容過程である。その過程で我々は複雑な観測条件下で自身及び周囲の環境を観測し,逐次的に内部モデルを発達させる.この過程はどのようなメカニズムに基づいているか?、複雑な連続的な変容過程はどのように進行するのか?という点に焦点をあてる.
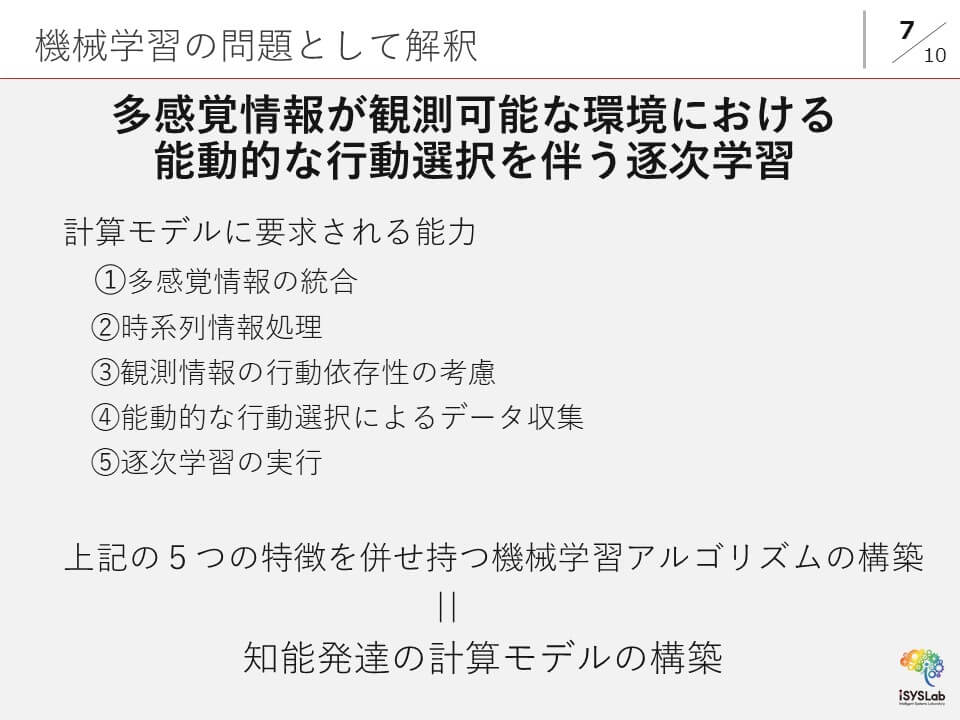
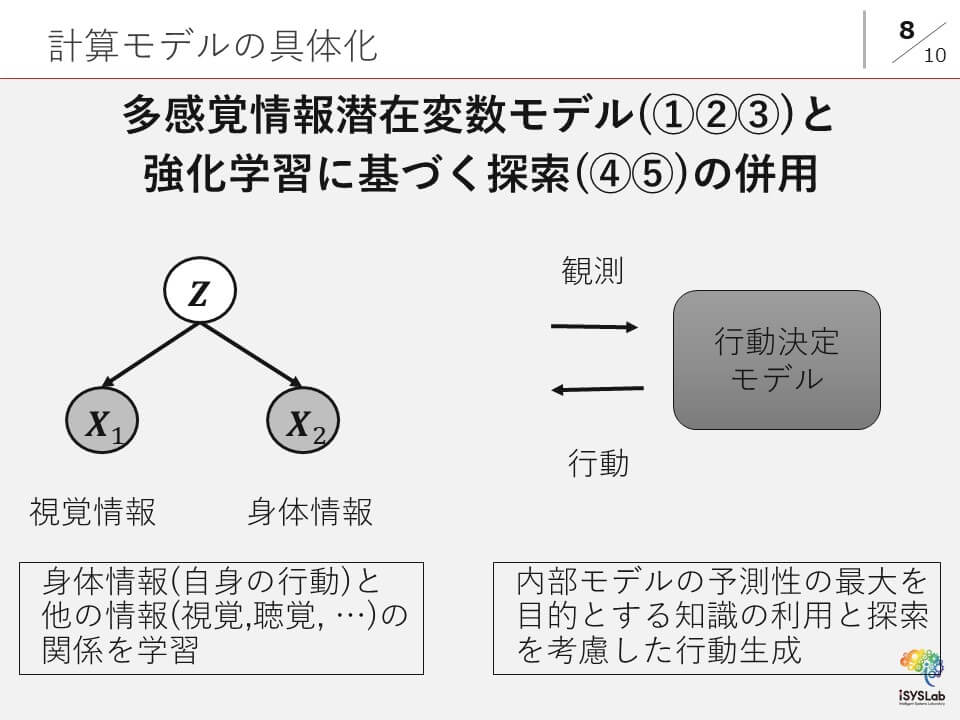
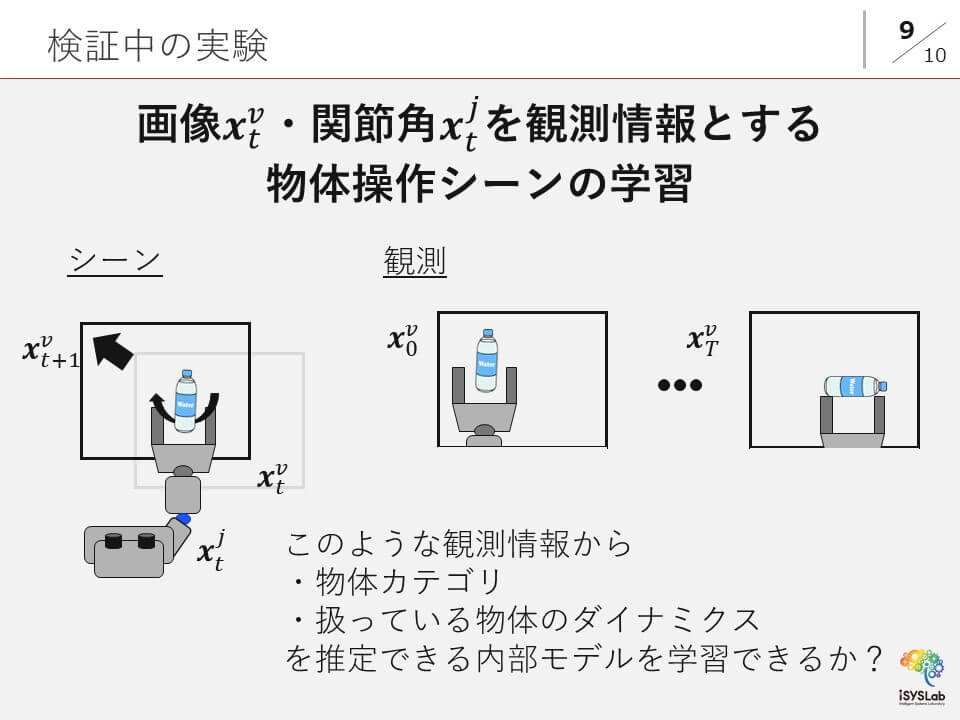
そのためのアプローチとして,発達過程を機械学習的観点から解釈し直し,再現可能な計算モデルを構築する.本研究ではモデルを具体化するために,他感覚情報潜在変数モデルと強化学習に基づく探索行動を併用を考える.第 1 段階として,他感覚情報潜在変数モデルによる視覚情報と身体情報の統合についての検証を進める.

Main Publications
- Variational Autoencoderを用いたマルチモーダル情報の統合, 第80回全国大会講演論文集, 2018(1), 17-18.