ROBOT
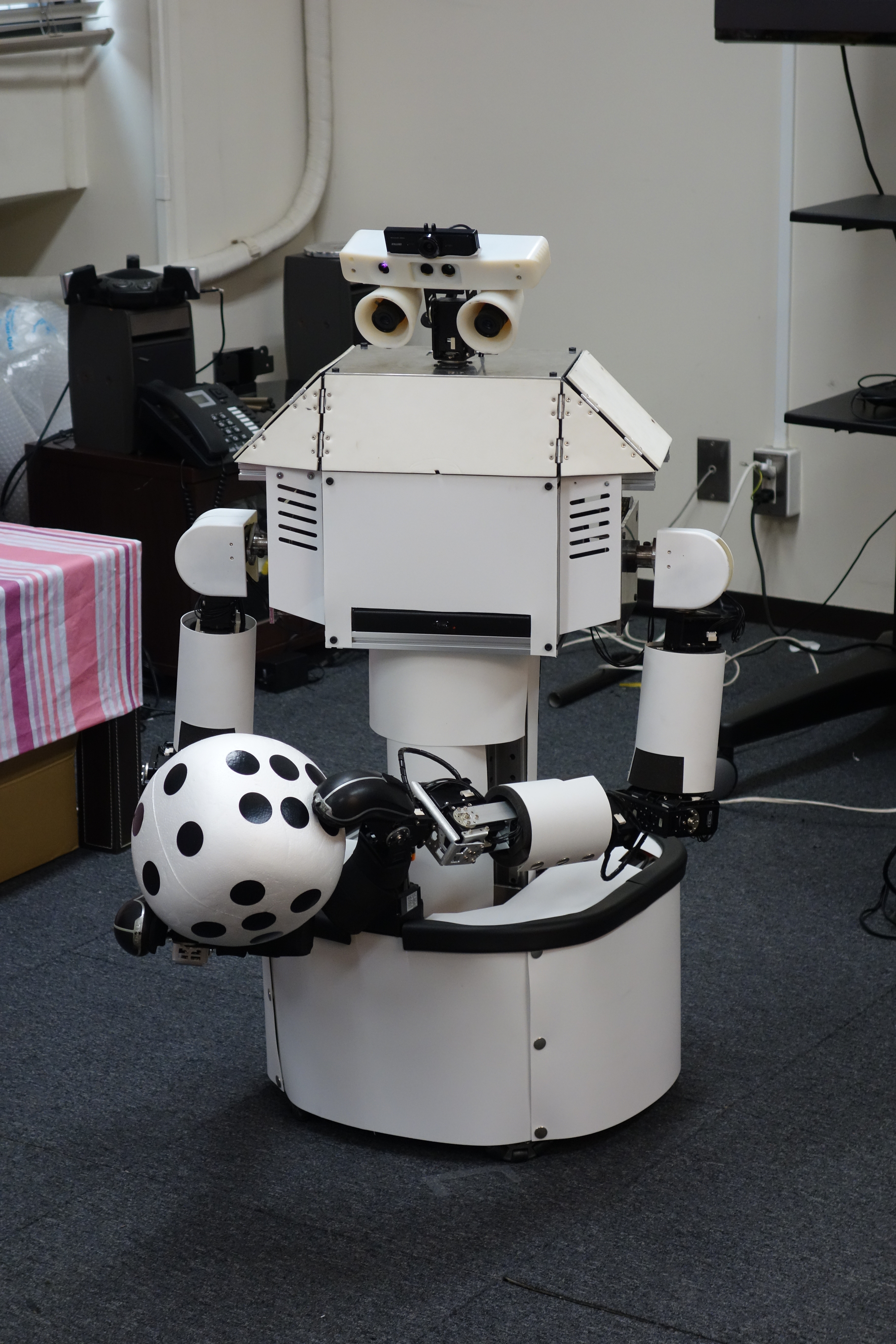
DiGORO
DiGORO (Dialog Partner of Human Robot)  is a humanoid robot platform developed by our team.
is a humanoid robot platform developed by our team.
RoboCup @Home WC 2009 and RoboCup @Home WC 2010
LiPRO
LiPRO (Little Partner Robot) is a humanoid robot platform of the DiGORO's
sister.
RoboCup @Home GPSR task @ JP 2014
HSR
HSR is a partner robot made by TOYOTA.
RoboCup @Home WC 2016 navigation
Software
Rospy:https://github.com/hausen6
EM Algorithm・DPM・HDP-LDA:https://github.com/naka-tomo
Vision engine:https://github.com/karaage-pp
Publications
[1]Joe Nishihara, Tomoaki Nakamura, Takayuki Nagai, "Online Algorithm for Robots to Learn Object Concepts and Language Model," IEEE Transactions on Cognitive and Developmental Systems, accepted
[2]Takahiro Kobori, Tomoaki Nakamura, Mikio Nakano, Takayuki Nagai, Naoto Iwahashi, Kotaro Funakoshi, and Masahide Kaneko, "Robust Comprehension of Natural Language Instructions by a Domestic Service Robot", Advanced Robotics (accepted)
[3]Muhammad Attamimi, Yuji Ando, Tomoaki Nakamura, Takayuki Nagai, Daichi Mochihashi, Ichiro Kobayashi and Hideki Asoh, "Learning Word Meanings and Grammar for Verbalization of Daily Life Activities Using Multilayered Multimodal Latent Dirichlet Allocation and Bayesian Hidden Markov Models", Advanced Robotics, Vol. 30, Issue 11-12, pp. 806-824, Jun. 2016
[4]Tadahiro Taniguchi, Takayuki Nagai, Tomoaki Nakamura, Naoto Iwahashi, Tetsuya Ogata, and Hideki Asoh, "Symbol Emergence in Robotics: A Survey", Advanced Robotics, Vol. 30, Issue 11-12, pp. 706-728, Jun. 2016
[5]Muhammad Attamimi, Takaya Araki, Tomoaki Nakamura, Takayuki Nagai, "Visual Recognition System for Cleaning Tasks by Humanoid Robots", International Journal of Advanced Robotic Systems: Humanoid, DOI:10.5772/56629, Nov.2013
[6]Takaya Araki, Tomoaki Nakamura, Takayuki Nagai, Kotaro Funakoshi, Mikio Nakano, and Naoto Iwahashi, "Online Object Categorization Using Multimodal Information Autonomously Acquired by a Mobile Robot", Advanced Robotics, Vol.26, pp.1995-2020, Oct.2012
[7]Tomoaki Nakamura, Takaya Araki, Takayuki Nagai and Naoto Iwahashi, "Grounding of Word Meanings in LDA-Based Multimodal Concepts", Advanced Robotics, Vol.25, pp. 2189-2206, Apr.2012
[8]Tomoaki Nakamura, Komei Sugiura, Takayuki Nagai, Naoto Iwahashi, Hiroyuki Okada, and Takashi Omori, "Learning Novel Objects for Extended Mobile Manipulation", Journal of Intelligent and Robotic Systems, pp.1-18, Jul.2011
[9]Takahiro Kobori, Tomoaki Nakamura, Takayuki Nagai, Naoto Iwahashi Mikio Nakano, Kotaro Funakoshi and Masahide Kaneko, "Robust Comprehension of Spoken Instructions using Multimodal Information for a Domestic Service Robot", IROS2016: Workshop on Machine Learning Methods for High-Level Cognitive Capabilities in Robotics, Oct. 2016
[10]Tomoaki Nakamura, Kensuke Iwata, Takayuki Nagai, Daichi Mochihashi, Ichiro Kobayashi, Hideki Asoh and Masahide Kaneko, "Continuous Motion Segmentation Based on Reference Point Dependent GP-HSMM", IROS2016: Workshop on Machine Learning Methods for High-Level Cognitive Capabilities in Robotics, Oct. 2016 (selected as oral presentation)
[11]Tatsuya Aoki, Joe Nishihara, Tomoaki Nakamura, Takayuki Nagai, "Online Joint Learning of Object Concepts and Language Model using Multimodal Hierarchical Dirichlet Process", IROS2016, 2636-2642
[12]Tatsuya Aoki, Takayuki Nagai, Joe Nishihara, Tomoaki Nakamura, and Muhammad Attamimi, "Multimodal Learning of Object Concepts and Word Meanings by Robots", NIPS 2015 Workshop: Multimodal Machine Learning, Dec. 2015
[13]Tomoaki Nakamura, Yoshiki Ando, Takayuki Nagai, Masahide Kaneko, "Concept Formation by Robots Using an Infinite Mixture of Models", IROS2015, pp.4593-4599, Sep. 2015
[14]Muhammad Attamimi, Yuji Ando, Tomoaki Nakamura, Takayuki Nagai, Daichi Mochihashi, Ichiro Kobayashi, and Hideki Asoh, "Learning Word Meanings and Grammar for Describing Everyday Activities in Smart Environments", EMNLP2015, pp.2249-2254, Sep. 2015
[15]Takayuki Nagai, Kasumi Abe, Tomoaki Nakamura, Oka Natsuki, and Takashi Omori, "Probabilistic Modeling of Mental Models of Others", RO-MAN2015, Tu2A.1, Sep. 2015
[16]Tomoaki Nakamura, Takayuki Nagai, Kotaro Funakoshi, Shogo Nagasaka, Tadahiro Taniguchi, Naoto Iwahashi, "Mutual Learning of an Object Concept and Language Model Based on MLDA and NPYLM", IROS2014, pp.600-607, Sep. 2014
[17]Muhammad Attamimi, Muhammad Fadlil, Kasumi Abe, Tomoaki Nakamura, Kotaro Funakoshi, Takayuki Nagai, "Integration of Various Concepts and Grounding of Word Meanings Using Multi-layered Multimodal LDA for Sentence Generation", IROS2014, pp.3005-3011, Sep. 2014
[18]Tomoaki Nakamura, Takaya Araki, Takayuki Nagai, Shogo Nagasaka, Tadahiro Taniguchi, and Naoto Iwahashi, "Multimodal Concept and Word Learning Using Phoneme Sequences with Errors", IROS2013, pp.157-162, Nov. 2013
[19]Muhammad Fadlil, Keisuke Ikeda, Kasumi Abe, Tomoaki Nakamura, and Takayuki Nagai, "Integrated Concept of Objects and Human Motions Based on Multi-layered Multimodal LDA", IROS2013, pp.2256-2263, Nov. 2013
[20]Takaya Araki, Tomoaki Nakamura, and Takayuki Nagai, "Long-term Learning of Concept and Word by Robots: Interactive Learning Framework and Preliminary Results", IROS2013, pp.2280-2287, Nov.2013.
[21]Yoshiki Ando, Tomoaki Nakamura, Takaya Araki, and Takayuki Nagai, "Formation of Hierarchical Object Concept Using Hierarchical Latent Dirichlet Allocation", IROS2013, pp.2272-2279, Nov.2013.
[22]Muhammad Attamimi, Tomoaki Nakamura, and Takayuki Nagai, "Hierarchical Multilevel Object Recognition Using Markov Model", ICPR2012, pp.2963-2966, Nov.2012
[23]Kasumi Abe, Akiko Iwasaki, Tomoaki Nakamura, Takayuki Nagai, Ayami Yokoyama, Takayuki Shimotomai, Hiroyuki Okada, and Takashi Omori, "Playmate Robots That Can Act According to Child's Mental State", IROS2012, pp.4660-4667, Oct.2012.
[24]Muhammad Attamimi, Keisuke Ito, Tomoaki Nakamura, and Takayuki Nagai, "A Planning Method for Efficient Mobile Manipulation Considering Ambiguity", IROS2012, pp.965-972, Oct.2012.
[25]Takaya Araki, Tomoaki Nakamura, Takayuki Nagai, Shogo Nagasaka, Tadahiro Taniguchi, and Naoto Iwahashi, "Online Learning of Concepts and Words Using Multimodal LDA and Hierarchical Pitman-Yor Language Model", IROS2012, pp.1623-1630, Oct.2012.
[26]Tomoaki Nakamura, Takayuki Nagai, and Naoto Iwahashi, "Bag of Multimodal Hierarchical Dirichlet Processes: Model of Complex Conceptual Structure for Intelligent Robots", IROS2012, pp.3818-3823, Oct.2012.
[27]Takaya Araki, Tomoaki Nakamura, Takayuki Nagai, Kotaro Funakoshi, Mikio Nakano, and Naoto Iwahashi, "Autonomous Acquisition of Multimodal Information for On-line Object Concept Formation by a Robot", IROS2011, pp.1540-1547, Sep.2011.
[28]Tomoaki Nakamura, Takayuki Nagai, and Naoto Iwahashi, "Multimodal Categorization by Hierarchical Dirichlet Process", IROS2011, pp.1520-1525, Sep.2011.
[29]Tomoaki Nakamura, Takayuki Nagai, and Naoto Iwahashi, "Bag of Multimodal LDA Models for Concept Formation", ICRA201, pp.6233-6238, May.2011.
information
Kara@ge++
NAGAI Lab
Building E-9-401,
The University of Electro-Communications, 1-5-1 Chifugaoka,
Chofu city, Tokyo, 182-8585, Japan